Xingyu Lin
@Xingyu2017Robot learning @openai. Previously @berkeley_ai @SCSatCMU. #Learning #Robotics
Similar User

@davheld

@abhishekunique7

@jackyliang42

@SongShuran

@YunzhuLiYZ

@huihan_liu

@danfei_xu

@LerrelPinto

@andyzeng_

@KuanFang

@Adithya_Murali_

@HarryXu12

@KaichunMo

@linshaonju

@Wenxuan_Zhou
What state representation should robots have? 🤖 I’m thrilled to present an Any-point Trajectory Model (ATM), which models physical motions from videos without additional assumptions and shows significant positive transfer from cross-embodiment human and robot videos! 🧵👇
Atlas is autonomously moving engine covers between supplier containers and a mobile sequencing dolly, using ML to detect and localize the environment fixtures and individual bin. There are no prescribed or teleoperated movements. youtu.be/F_7IPm7f1vI
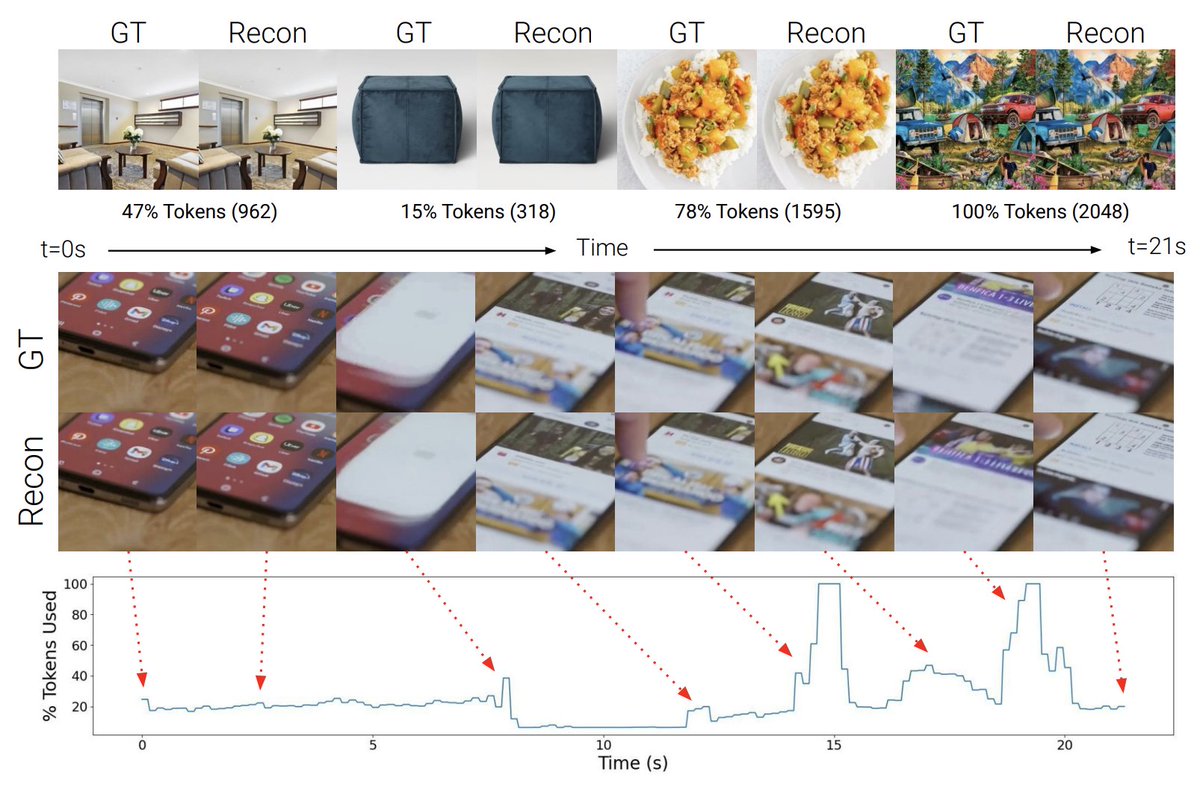
We are excited to announce ElasticTok, a simple yet scalable visual tokenizer that can adaptively encode image and video to variable-length sequences! Our model enables more efficient token usage over different images and long dynamic videos.
I am excited to share our latest work on teaching robots to use novel tools! Our results show that intelligent tool-use skills can be learned through a general framework of predicting task-conditioned pointcloud trajectories. Check out the detailed thread by @carl_qi98

How can an autonomous agent leverage novel tools to cut, roll, and scoop a piece of dough, given just a few tool shapes for training? Our method generates a “desired tool shape” that performs the motion and then matches the real tool to the generated shape.sites.google.com/view/toolgen
We have an amazing group of speakers from industry and academia. Please join us in this exploration towards high dimension action space!

Join us for the @corl_conf Workshop on Whole-Body Control & Bimanual Manipulation: Applications in Humanoids & Beyond! 🤖 Hear from an incredible lineup of speakers from academia & industry as we dive into the latest advancements in this exciting field! #CoRL2024 #Robotics #AI

Unitree G1 mass production version, leap into the future! Over the past few months, Unitree G1 robot has been upgraded into a mass production version, with stronger performance, ultimate appearance, and being more in line with mass production requirements. We hope you like it.🥳…
We will present ATM at #RSS2024 from 8:30-9:30 am tomorrow (Thursday) at the Robot Learning Foundation Models session and at the poster session in room Senaatszaal. Come and chat about video pre-training and cross-embodiment learning if you are around!
What state representation should robots have? 🤖 I’m thrilled to present an Any-point Trajectory Model (ATM), which models physical motions from videos without additional assumptions and shows significant positive transfer from cross-embodiment human and robot videos! 🧵👇
I will be presenting HumanoidBench today at #RSS2024 in the Locomotion and Manipulation session starting at 11am! You will find me at the poster session (Commissiekamer 2) throughout the day 🤖
Humanoids 🤖 will do anything humans can do. But are state-of-the-art algorithms up to the challenge? Introducing HumanoidBench, the first-of-its-kind simulated humanoid benchmark with 27 distinct whole-body tasks requiring intricate long-horizon planning and coordination. 🧵👇
🚨Important update from our Robot Learning Lab in London. Following recent news, we’re moving on after a wonderful 2 years… Today, we unveil 4 big pieces of research from our incredible team. Check out the compilation video and thread below to see our final work! 📽️👇
In this video, not one but two Reachy 🤖🤖 are demonstrating their manipulation skills and ability to cooperate, while being teleoperated by our talented team members! More info on discord.gg/XRCPWWvWMv #robotsdoingthings #teleoperation #robotics #opensource
2/2 papers accepted at #RSS2024🥳. Huge congratulations to my incredible collaborators! Check out our work on trajectory modeling from videos: xingyu-lin.github.io/atm/ and humanoid benchmark for whole-body control: humanoid-bench.github.io
#ICRA2024 Will present at the poster session at 10:30 AM today and oral session at 4:30 pm! Exhibition hall, booth 0304.
Excited to share my first paper at UC Berkeley! We identify key bottlenecks in learning from a pre-trained visual representation and show generalization to novel objects from only three instances.🧵⬇️ Website: xingyu-lin.github.io/spawnnet/
I will be at ICRA next week to present SpawnNet! Happy to chat about pre-training from videos or robot learning in general :)
Excited to share my first paper at UC Berkeley! We identify key bottlenecks in learning from a pre-trained visual representation and show generalization to novel objects from only three instances.🧵⬇️ Website: xingyu-lin.github.io/spawnnet/
Predicting future point trajectory can serve as a "language" for actions, bridging different embodiments. It's exciting to see new work advancing in this direction! If you are interested, also also check out our prior ATM paper: xingyu-lin.github.io/atm/

Track2Act: Our latest on training goal-conditioned policies for diverse manipulation in the real-world. We train a model for embodiment-agnostic point track prediction from web videos combined with embodiment-specific residual policy learning homangab.github.io/track2act/ 1/n
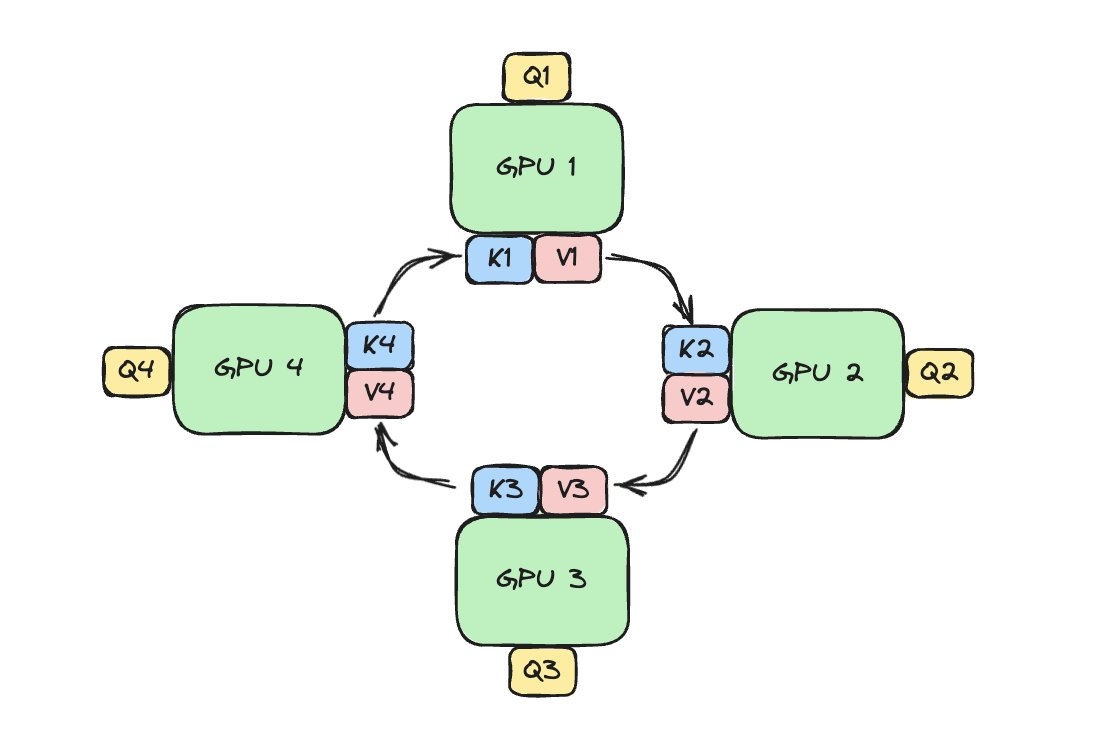
How do LLMs scale to million token context window? Ring Attention is a nice trick to parallelize long sequence across devices and rotate them in a ring with zero overhead scaling. In our new blog, we cover the tricks behind this magic. It looks like this (1/5🧵)
🚀 Excited to share our breakthrough paper "SpatialTracker: 3D Space Tracking for 2D Pixels" - selected as highlight paper at #CVPR2024! We lifted the dense pixels tracking into 3D space👇 For more details, welcom to check out: henry123-boy.github.io/SpaTracker/
I am hiring a post-doc! Goals: develop new methods for robot learning + spatial reasoning + object manipulation; help lead a new MURI project on robots learning to overcome unexpected challenges. My previous post-doc now is now faculty at USC. Please reach out if interested!
Unitree H1 The World's First Full-size Motor Drive Humanoid Robot Flips on Ground. Unitree H1 Deep Reinforcement Learning In-place Flipping ! #Unitree #UnitreeRobotics #AI #Robotics #Humanoidrobots #Worldrecord #Flips #EmbodiedAI #ArtificialIntelligence #Technology #Innovation
The difficulty of a manipulation task is largely defined by the amount of task variations the robot needs to handle, such as object geometries and poses. Glad to see new robot demos with more diverse objects!

Introducing a fully open-sourced simulation benchmark with challenging whole-body control tasks and whole-body sensing!
Humanoids 🤖 will do anything humans can do. But are state-of-the-art algorithms up to the challenge? Introducing HumanoidBench, the first-of-its-kind simulated humanoid benchmark with 27 distinct whole-body tasks requiring intricate long-horizon planning and coordination. 🧵👇
Can we use wearable devices to collect robot data without actual robots? Yes! With a pair of gloves🧤! Introducing DexCap, a portable hand motion capture system that collects 3D data (point cloud + finger motion) for training robots with dexterous hands Everything open-sourced








































































































United States Trends
- 1. Mike 1,81 Mn posts
- 2. Serrano 235 B posts
- 3. #NetflixFight 69,8 B posts
- 4. Canelo 15,8 B posts
- 5. #netflixcrash 15,3 B posts
- 6. Father Time 10,6 B posts
- 7. Logan 75,9 B posts
- 8. Rosie Perez 14,5 B posts
- 9. He's 58 22,8 B posts
- 10. #buffering 10,7 B posts
- 11. Shaq 15,5 B posts
- 12. Boxing 283 B posts
- 13. ROBBED 100 B posts
- 14. My Netflix 81,6 B posts
- 15. Tori Kelly 5.044 posts
- 16. Roy Jones 7.034 posts
- 17. Ramos 69,9 B posts
- 18. Cedric 21,3 B posts
- 19. Gronk 6.507 posts
- 20. Barrios 50,2 B posts
Who to follow
-
 David Held
David Held
@davheld -
 Abhishek Gupta
Abhishek Gupta
@abhishekunique7 -
 Jacky Liang
Jacky Liang
@jackyliang42 -
 Shuran Song
Shuran Song
@SongShuran -
 Yunzhu Li
Yunzhu Li
@YunzhuLiYZ -
 Huihan Liu
Huihan Liu
@huihan_liu -
 Danfei Xu
Danfei Xu
@danfei_xu -
 Lerrel Pinto
Lerrel Pinto
@LerrelPinto -
 Andy Zeng
Andy Zeng
@andyzeng_ -
 Kuan Fang
Kuan Fang
@KuanFang -
 Adithya Murali
Adithya Murali
@Adithya_Murali_ -
 Huazhe Harry Xu@CORL
Huazhe Harry Xu@CORL
@HarryXu12 -
 Kaichun Mo
Kaichun Mo
@KaichunMo -
 Lin Shao
Lin Shao
@linshaonju -
 Wenxuan Zhou
Wenxuan Zhou
@Wenxuan_Zhou
Something went wrong.
Something went wrong.