
Stefanos Charalambous
@stefanos_ch3AI for Robotics @SonyAI_global Prev. {@leggedrobotics @GTrobotics) Opinions are my own
Similar User

@OrdonezApraez

@servo_boyd

@junja941

@Fmrico

@HoellerDavid

@catachiii

@AriellaMans

@schlurry

@FenglongS

@NikstedLoop

@kiazon1

@SomeRobot1
How is the Grandmaster-Level Chess W/o Search paper relevant to robotics? My take: - Search in sim (aka MPC) for data collection will be key to achieve the desired optimal labels/ params ratio - Search during inference not necessary Derived from @chris_j_paxton 's commentary

Yeah I think that's reasonable. The other thing to note is that this is *far* more optimal labels than you have parameters - this can be hard to achieve! llama 3.2-400b actually roughly fits the same pattern, for example, with Meta's ~15 trillion tokens.
Is it the most agile legged robot out there?

Unitree G1 mass production version, leap into the future! Over the past few months, Unitree G1 robot has been upgraded into a mass production version, with stronger performance, ultimate appearance, and being more in line with mass production requirements. We hope you like it.🥳…
Unitree Introducing | Unitree G1 Humanoid Agent | AI Avatar Price from $16K 🤩 Unlock unlimited sports potential(Extra large joint movement angle, 23~34 joints) Force control of dexterous hands, manipulation of all things Imitation & reinforcement learning driven #Unitree #AI
This being tele-operated is what makes it perfect Realistically tele-op deployment will come first before autonomy which will also help fuel the data pipeline (similar to Tesla's FSD strategy)

Reflex had a great time at #MODEX2024. We had Reflex continuously pick from a shelf and put the items back, while allowing anyone in the crowd to interrupt with a command. Overall, we had ~1k requests from the crowd - here is a sneak peek from our busiest day! Full video link…
Trying to use RL for a problem that could be solved with classic motion planners

Really cool work combining RL and MPC! - Learn to imitate MPC - Then finetune using RL

If you have a model-based controller, why don't you use it to craft a better policy? We present our recent RA-L paper, Imitating and Finetuning Model Predictive Control (IFM), to bridge model-based and learning-based methods for legged locomotion. @HyunyoungJung5 @HwangboJemin

Crafting multi-contact loco-manipulation behaviors for sparsely-defined tasks, like traversing spring-loaded doors or closing heavy dishwashers, is challenging. Check out our proposed solution for our legged mobile manipulator: youtu.be/rAP7M4BL9sQ @SciRobotics @ETH_en

No spoilers, but this is the cleverest football advert I've ever seen.

The last decade has seen tremendous progress in legged robots, driven by (among other things) optimization-based control. With Patrick Wensing, Yue Hu, Adrien Escande, Nicolas Mansard, and Andrea del Prete, we survey the field with an eye on what's next.🧵 arxiv.org/abs/2211.11644

Elon Musk revealed the #TeslaBot today and I have #robotics thoughts. twitter.com/ElectrekCo/sta… 🧵

"What simulator do they use?" "They don't!" (Actual conversation snippet with my supervisor) That's an eye-opening demonstration of the power of world models. A whole new world of possibilities for the robotics community Impressive work @AleEscontrela !

Excited to announce DayDreamer, an application of learned world models to robot learning without simulators! DayDreamer enables a robot dog to learn to walk in one hour without resets, simulators, or demonstrations, as well as visual pick and place and navigation tasks thread🧵
This talk by Marco Hutter is, literally, astonishing. Simple RL methods + simulation being used to do unbelievable things (navigation in hard spaces, tricky surfaces, literal construction, etc.) youtube.com/watch?v=24uTRT…

The climate spiral, showing changes in global temperature since 1880. 2022 edition, by @marksubbarao and NASA SVS. svs.gsfc.nasa.gov/4975
I'm taking 4 courses at @ETH_en . There is no Intro to RL course at ETH, so I'm also following the respective course by @DeepMind . So grateful to live in a time where endless learning opportunities are available at the click of a 🖱. Once done, off to @UCBerkeley for Deep RL 😅
Saving this series as a treat for once I'm done with exams

4th Video in Reinforcement Learning Sequence! Overview of Deep Reinforcement Learning Methods youtu.be/wDVteayWWvU
Wild ANYmal! We present an exceptionally robust perceptive reinforcement learning controller for legged robots in our latest @SciRobotics article. Full video: youtu.be/zXbb6KQ0xV8 Paper: science.org/doi/10.1126/sc… @ETH_en @ETH @ScienceMagazine #robot #AI #science #WildANYmal
Despite of our easy access to a sea of open-source implementations, one should not underestimate the benefit of deep understanding that can only be accessed through the implementation process itself #OpenSource #Robotics
Quadrupedal systems are better suited to all (except strictly human-centered) applications than humanoids!
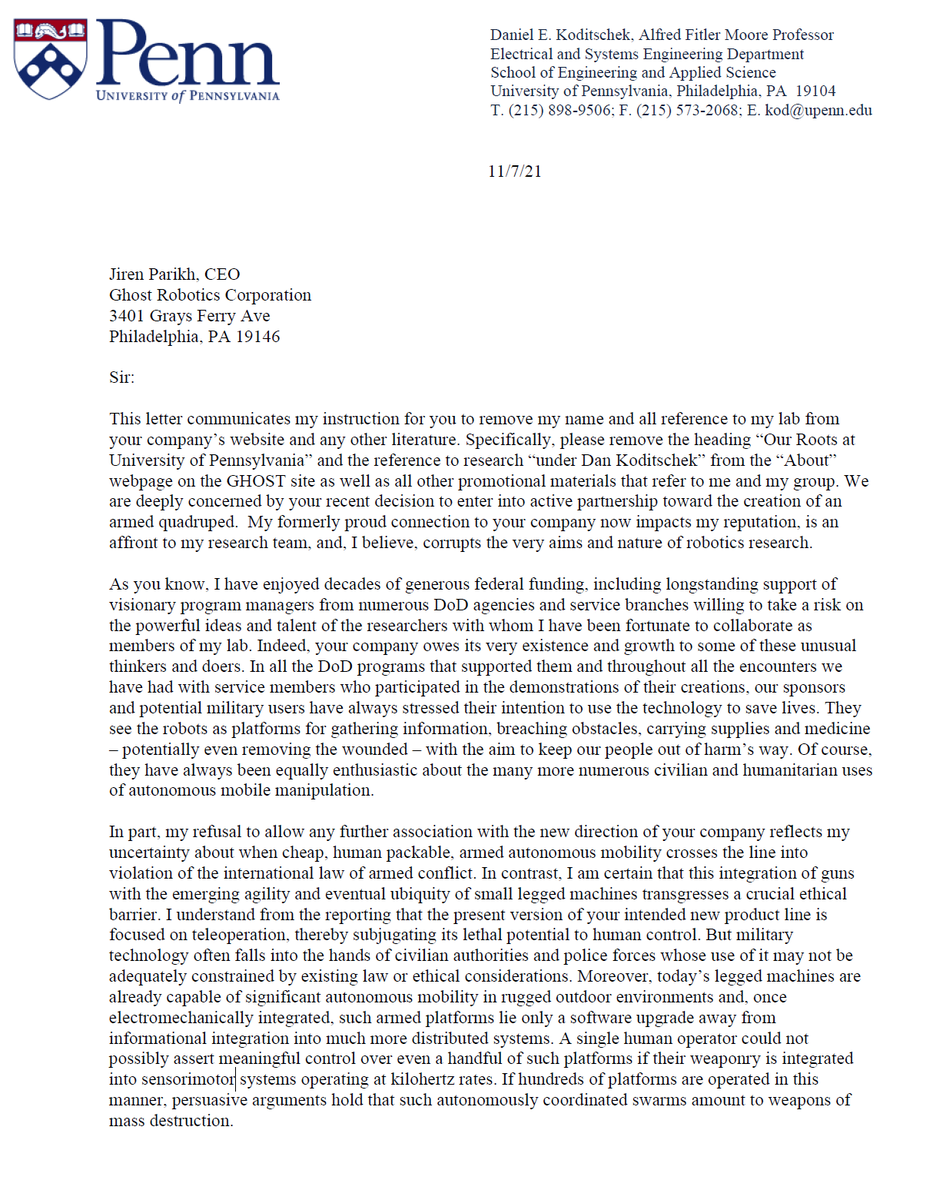
This letter resonates deeply with those of us that believe in the #roboticsforgood applications of legged robots

In light of Ghost's turn toward active partnerships to arm its legged robots, Koditschek is having his name and all references to Kod*lab removed from the company's website and promotional literature. Koditschek's letter to Ghost's CEO: kodlab.seas.upenn.edu/news/koditsche…


Today YouTubers @MrBeast and @MarkRober launched the #TeamSeas campaign to remove 30M pounds of trash. The Ocean Cleanup and @OurOcean were chosen as the non-profit partners for cleaning up trash in rivers, oceans, and beaches. Every $1 donated = 1lb of trash removed.































































































United States Trends
- 1. ICBM 142 B posts
- 2. #KashOnly 19 B posts
- 3. The ICC 96,1 B posts
- 4. Good Thursday 27,6 B posts
- 5. #ThursdayVibes 3.895 posts
- 6. International Criminal Court 51,6 B posts
- 7. #ThursdayMotivation 5.355 posts
- 8. Bezos 29,4 B posts
- 9. Gallant 134 B posts
- 10. Happy Friday Eve N/A
- 11. Dnipro 57,4 B posts
- 12. Adani 797 B posts
- 13. Katie Couric N/A
- 14. #21Nov 3.233 posts
- 15. Reece James 9.300 posts
- 16. #thursdaytechnology N/A
- 17. Diddy 102 B posts
- 18. Nikki 54,7 B posts
- 19. Vegito 2.298 posts
- 20. MIRV 1.240 posts
Who to follow
-
 Daniel Felipe Ordoñez Apraez 🇨🇴
Daniel Felipe Ordoñez Apraez 🇨🇴
@OrdonezApraez -
 Nathan Boyd 🐙
Nathan Boyd 🐙
@servo_boyd -
 Joonho Lee
Joonho Lee
@junja941 -
 Francisco Martín 🇪🇺
Francisco Martín 🇪🇺
@Fmrico -
 David Hoeller
David Hoeller
@HoellerDavid -
 Jin Cheng
Jin Cheng
@catachiii -
 Ariella Mansfield
Ariella Mansfield
@AriellaMans -
 Lorenz Wellhausen
Lorenz Wellhausen
@schlurry -
 Fenglong Song
Fenglong Song
@FenglongS -
 Nikki
Nikki
@NikstedLoop -
 KIAZON
KIAZON
@kiazon1 -
 SomeRobot
SomeRobot
@SomeRobot1
Something went wrong.
Something went wrong.